- Startseite
- Überblick
- Digitales Kulturgut
- Forschung, Publikation & Projektorganisation
- IT-Infrastruktur
- Über uns
3D-Digitalisierungsverfahren wie 3D-Scanning und Photogrammetrie haben bereits vor einigen Jahrzehnten Einzug in den kulturwissenschaftlichen Sektor erhalten. Durch das Fortschreiten der technologischen Entwicklung sind diese Techniken immer weiter auf dem Vormarsch. Ihre Anwendungsbereiche sind weit gefächert: von Landschaftsaufnahmen und Kartierungen über Architekturdokumentationen, -modellierungen und -rekonstruktionen, die digitale Gestaltung historischer und aktueller Räume bis hin zur Digitalisierung, Präsentation und Rekonstruktion historischer Artefakte.
Die Ausdehnung der Digitalisate in den dreidimensionalen Raum ergänzt die Möglichkeiten der "klassischen" Photographie nicht nur um eine räumliche Dimension. Auch die Wahrnehmung und Erfahrbarkeit von Kulturgütern erhält vielfältige neue Dimensionen. Digitale Museen und Präsentationsplattformen bringen ForscherInnen und Interessierten kulturelle Inhalte auf dem Bildschirm und in XR-Umgebungen nahe. Personen, Artefakte und Räume interagieren im digitalen Raum. Rekonstruierte Raumstimmungen werden digital sinnlich erlebbar.
Betrachten wir ein Objekt wie ein historisches Artefakt, nehmen wir viele Faktoren gleichzeitig und als Einheit war. Wir erfassen in einem Blick die räumliche Struktur des Objekts, seine Dimensionen, Anordnung im Raum, Beleuchtung, Färbung und vieles mehr. Viele dieser Aspekte lassen sich digital erfassen. Aufgrund der technischen Bedürfnisse hat es sich etabliert, zwischen der Geometrie eines Objekts (seiner Ausdehnung und Struktur im Raum), seiner Textur (der Färbung) und seinen Materialien (physikalische Eigenschaften, darunter ggf. auch Farbwerte) zu unterscheiden.
Wollen wir ein Objekt, eine Architektur oder eine Landschaft durch 3D-Scanning oder Photogrammetrie dreidimensional digitalisieren, müssen wir diese Differenzierung aufgreifen. Wir erstellen zunächst ein räumliches Geometrie-Modell, das wir in weiteren Schritten mit Texturen und/oder Materialien in Verbindung bringen können.
Nicht jedes Geometrie-Modell muss mit Texturen und/oder Materialien versehen werden. Je nach Bedarf kann ein Geometrie-Modell vollkommen ausreichend sein, beispielsweise für Messungen oder als Grundlage für spätere Rekonstruktions- und Simulationsverfahren.

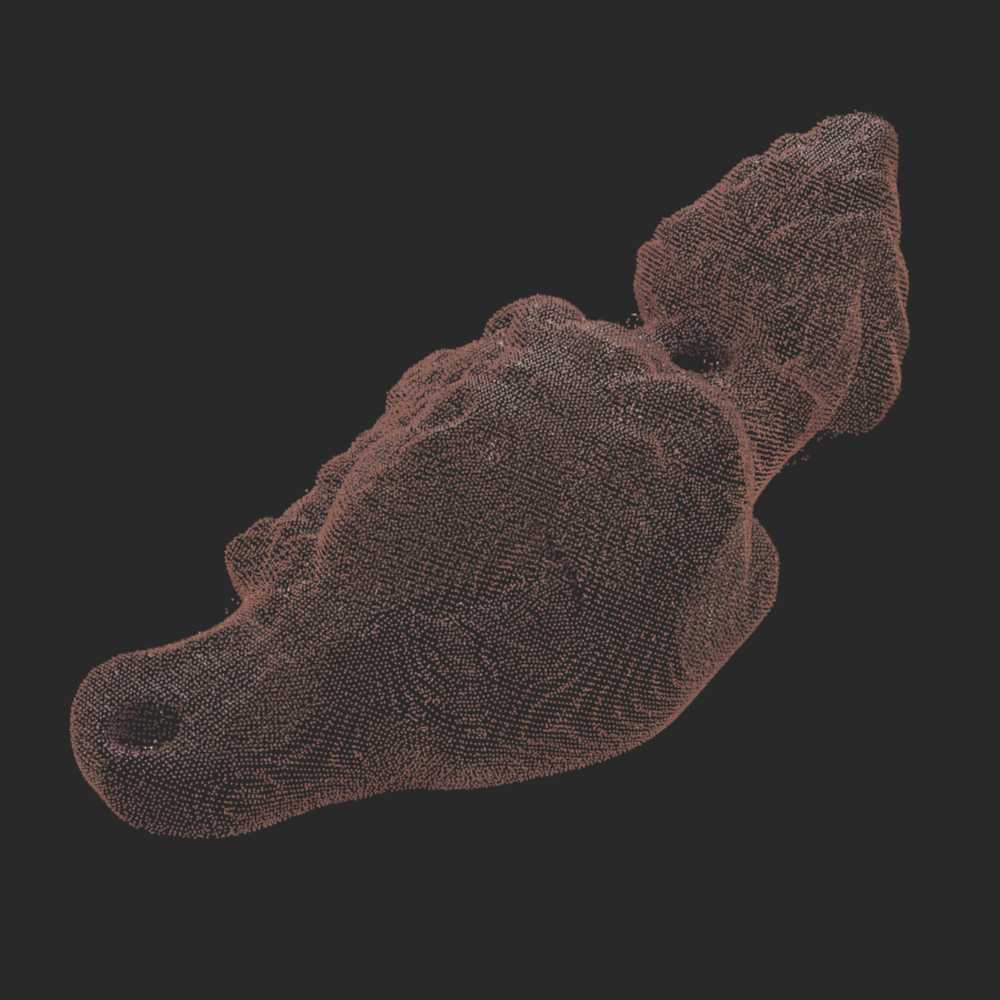
3D-Scanning basiert auf der Erfassung räumlicher Daten durch optische Aufnahmeverfahren. Nach dem Scannen liegen die aufgenommenen Daten als Punktwolke vor, deren Bestandteile je nach Ausstattung des 3D-Scanners mit räumlichen und teilweise farblichen / texturiellen Informationen verbunden sind. Die Größe der Punktwolke variiert in Abhängigkeit von den Dimensionen und der Beschaffenheit des Objekts und der gewünschten Genauigkeit des 3D-Modells. Bei wissenschaftlichen Anwendungen sind Werte im fünf- bis siebenstelligen Bereich keine Seltenheit.
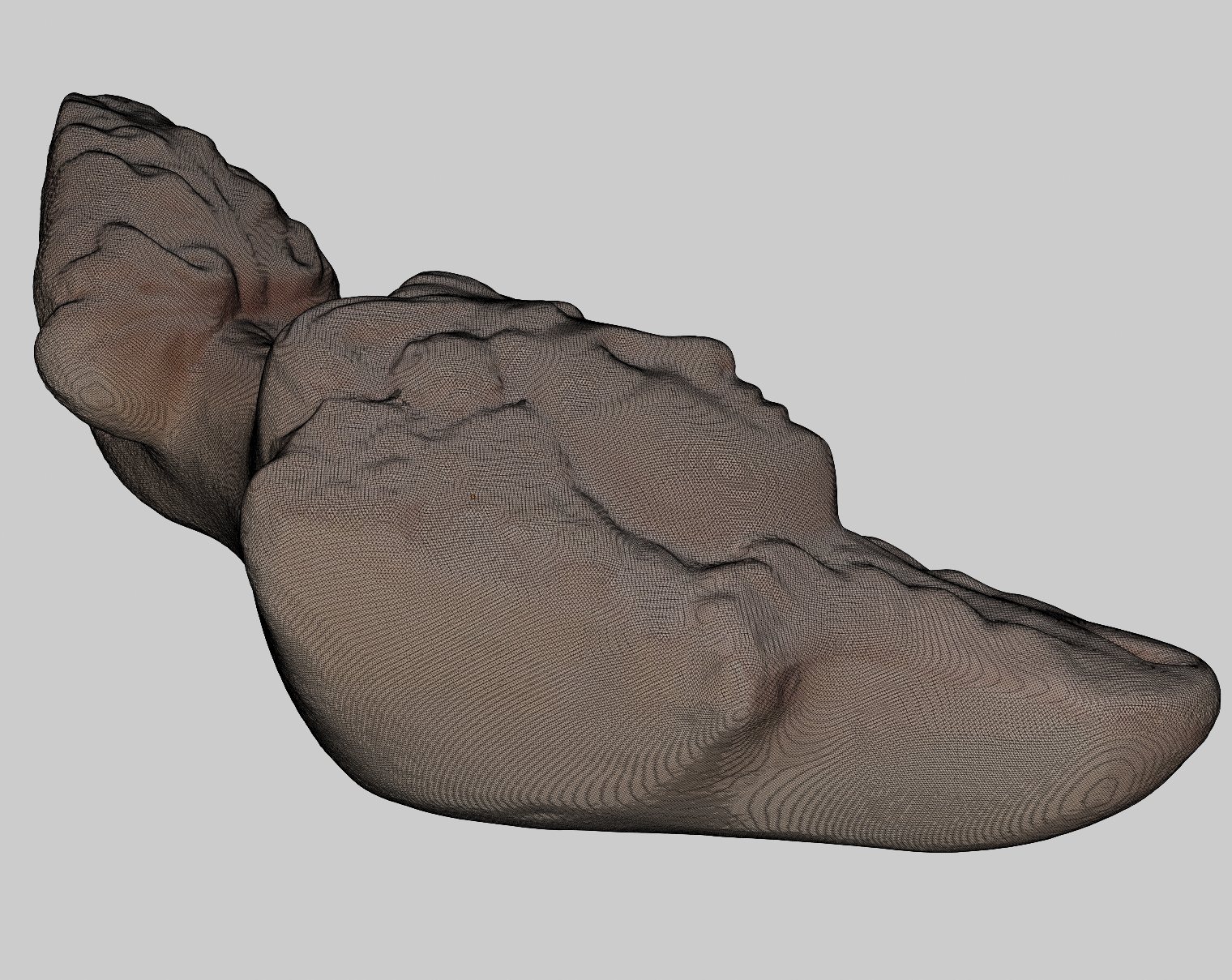
Für die weitere Verarbeitung der Informationen werden die eingescannten Punkte mittels algorithmischer Verfahren zu geschlossenen Geometriemodellen verschmolzen. Nachdem die geometrischen Angaben der eingescannten Punkte aufeinander (bzw. auf ein gemeinsames Koordinatensystem) bezogen sind, werden die Lücken zwischen ihnen durch Kanten geschlossen. So entsteht eine Oberfläche aus Polygonen, die die Oberfläche des realen Objekts nachahmen. Unter Laborbedingungen können dabei Genauigkeiten von unter 0,1mm erreicht werden. Je nach Größe und Verwendungszweck des 3D-Modells sollte das Geometrie-Modell zur weiteren Verarbeitung vereinfacht werden. Algorithmische Verfahren reduzieren die Anzahl an Punkten und Flächen und damit die Größe der digitalen Datei. Bei der Umsetzung dieses Schrittes muss darauf geachtet werden, dass die Oberflächenstruktur des 3D-Modells so umfassend wie möglich und nötig erhalten bleibt. Gerade in wissenschaftlichen Anwendungen wird aufgrund der Dokumentationsgenauigkeit oft auf zu starke Reduktionen verzichtet, die bei Visualisierungen durchaus anwendbar und hilfreich sind. Soll das Modell ausschließlich zur Visualisierung, zur Wissensvermittlung und/oder zum Entertainment genutzt werden, lassen sich Bereiche, die für 3D-Scanner nicht erreichbar sind, durch Modellierungen ergänzen. Das gleiche Verfahren kann für Rekonstruktionen genutzt werden. Da modellierte Bereiche keine "gemessenen" Raumpunkte beinhalten, sollte ihre Schaffung dokumentiert werden, um sie in wissenschaftlichen Anwendungen von den gemessenen Oberflächenbereichen unterscheiden zu können.
Sind Berechnung und Optimierung des Geometrie-Modells abgeschlossen, kann dieses bei Bedarf mit Texturdaten verknüpft werden. Mögliche Texturquellen sind die in viele 3D-Scanner integrierten Texturkameras und zusätzlich aufgenommene Photographien. Der 3D-Scan wird algorithmisch und/oder manuell in Einzelflächen "zerlegt", die anschließend mit Bildoberflächen in den Photographien verbunden werden. Bei Bedarf können einzelne Bereiche (z.B. nachmodellierte Flächen) andersfarblich gekennzeichnet werden.
Durch ihre Technik sind 3D-Scannern einigen Einschränkungen unterworfen. Ihre Sensoren reagieren teils empfindlich auf Änderungen beim Umgebungslicht, der Umgebungstemperatur und -luftfeuchtigkeit. Reflektierende, transparente, dunkle und große flächige Oberflächen können ihnen Schwierigkeiten bereichen. Da Lösungsverfahren wie das Aufbringen von Sprays, Klebepunkten und Farbstiften bei Kulturgut zumeist nicht angewandt werden können, müssen Strategien entwickelt werden, wie diese Bereiche optimal erfasst werden können.
Die Photogrammetrie nutzt ein ähnliches Verfahren wie das 3D-Scanning, ist jedoch nicht auf spezielle Geräte zur Bildaufnahme angewiesen. Spezialisierte Computerprogramme vollziehen die Berechnung der räumlichen Informationen einer Landschaft, Architektur oder eines Objekts anhand von Photographien, die (je nach Anforderungen an Qualität und Textur) mit jeder handelsüblichen Kamera und jedem Smartphone aufgenommen werden können. Zur Optimierung der Berechnungen sollte auf einen systematischen Aufbau und hochwertige Aufnahmen zurückgegriffen werden. Daher schließt die Photogrammetrie direkt an unseren Angeboten und Leistungen zur Photographie an.
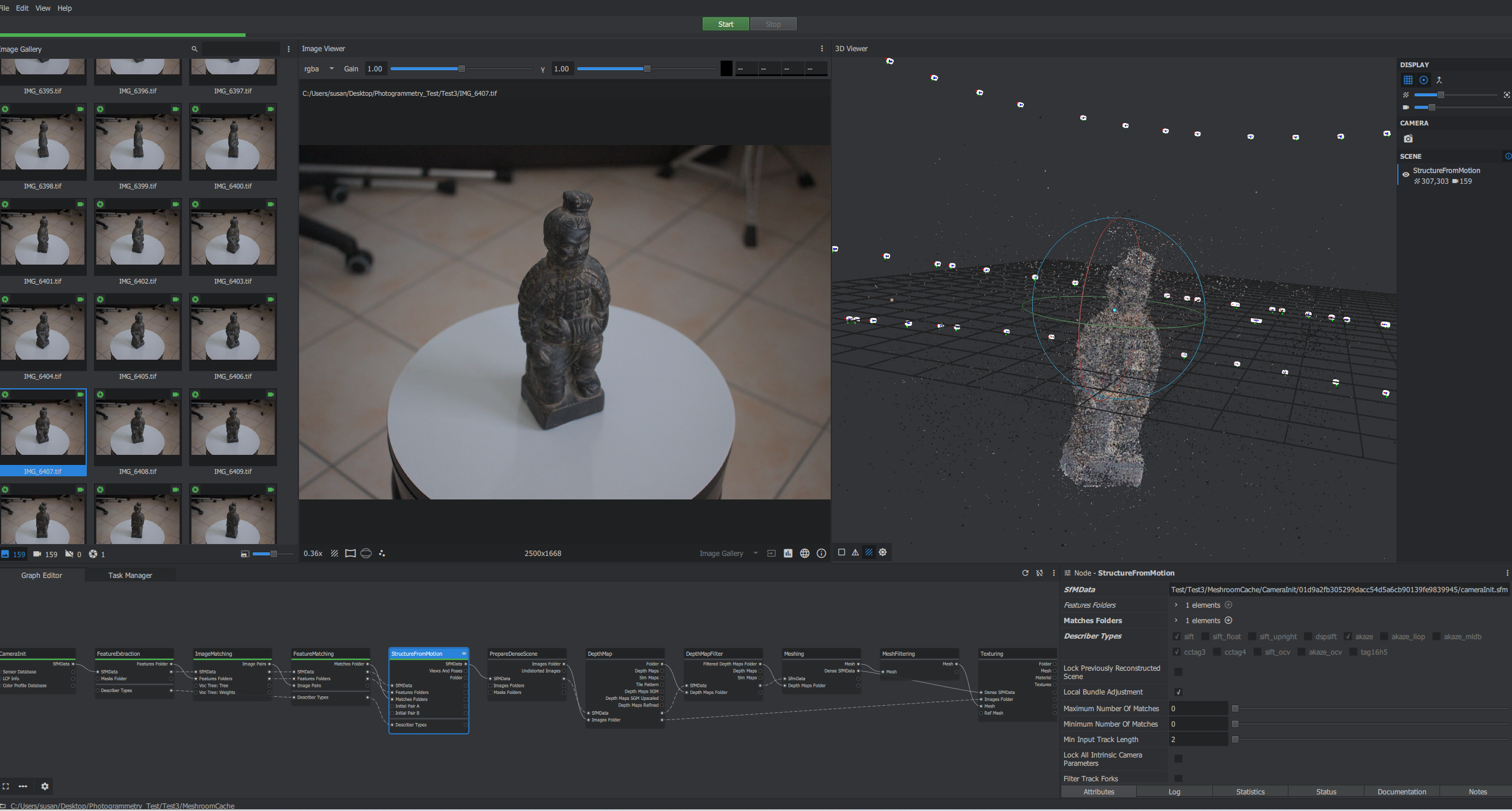
In einem ersten Schritt wird das Objekt aus möglichst vielen Perspektiven photographiert. Bilderzahlen im drei- bis vierstelligen Bereich sind hier nicht nur keine Seltenheit, sondern sogar grundlegend erforderlich.
Nach ersten Optimierungsberechnungen beginnt der computerbasierte Teil der Photogrammetrie-Pipeline: Spezialsoftware bestimmt anhand wiederkehrender Charakteristika in den Bildern, den für die Aufnahmen genutzten Kamerapositionen und mathematischen Berechnungsverfahren die räumliche Geometrie der aufgenommenen Szene. Die in den Bildern vorhandenen Farbwerte werden anschließend zur Bestimmung einer hochwertigen Texturierung des Geometrie-Modells herangezogen. Im Verlauf dieses Prozesses entstehen präzise 3D-Modelle mit einer hohen Messpräzision und qualitätvollen Texturierung, die sowohl für visuelle Präsentationen als auch für Messverfahren genutzt werden können.
Durch die Unterschiede bei der Datenaufnahme ergänzen sich 3D-Scanning und Photogrammetrie gegenseitig und können wechselseitige Schwächen beseitigen und Stärken ausnutzen. Der schnelleren und einfacheren Datenaufnahme des 3D-Scanning steht eine etwas sichere Raumberechnung der Photogrammetrie gegenüber. Durch sie kann beispielsweise die Messpräzision des 3D-Scannings erhöht werden. Zudem ermöglicht die Photogrammetrie eine bessere dreidimensionale Erfassung von Objektbereichen wie dunklen und/oder gleichförmigen Oberflächen, die von 3D-Scannern nur schwer aufgenommen werden können. Die Auswahl zwischen den beiden Verfahren sollte anhand der Bedürfnisse und der Raum- und Objektbeschaffenheiten getroffen werden. In bestimmten Situationen empfiehlt sich eine Kombination beider Verfahren.
Durch die Nutzung von Photographien zur Berechnung des Geometrie-Modells wird in der Photogrammetrie-Pipeline bereits eine qualitätvolle Textur berechnet. Beim 3D-Scanning begegnet uns eine andere Ausgangslage. Viele der heute gebräuchlichen 3D-Scanner nehmen durch integrierte Kameras selbst Texturdaten in guter Qualität auf. Da die Geräte auf die Aufnahme räumlicher Geometriedaten ausgerichtet sind, erreicht die von ihnen aufgenommene Textur jedoch in den seltensten Fällen die Qualität professioneller Photographien. Daher sollte die während des Scannens aufgenommene Textur durch hochqualitative Photographien des gescannten Objekts ergänzt oder ersetzt werden.
Hierfür photographieren wir das Objekt mit einer geeigneten Ausleuchtung aus verschiedenen Winkeln und Perspektiven. Nach einer weiteren Optimierung der Photographie-Daten werden die Farben und Schattierungen der Bilder auf dem zuvor aufgenommenen 3D-Modell aufgebracht (Texture Mapping).
Sollen 3D-Scans zu wissenschaftlichen Zwecken oder allgemein zur Vermeßung genutzt werden, sollte auf nachträgliche Eingriffe in die durch den 3D-Scanner aufgenommenen Daten verzichtet werden. Sie bilden die Meßdaten, die nicht durch subjektive manuelle Veränderungen beeinflußt werden sollten, um ihre Zuverläßigkeit und Aussagekraft zu erhalten.
Soll ein 3D-Scan hingegen (auch) in einer Visualisierung, Musealisierung oder ästhetisch ausgerichteten Darstellungsform präsentiert werden, können ergänzende Modellierungen der 3D-Scandaten unerläßlich sein, um das reale Objekt digital so zu präsentieren, wie es in der Realität wahrnehmbar ist. 3D-Scanner stoßen aufgrund ihrer Funktionsweise und/oder bestimmter Charakteristika der gescannten Artefakte manchmal an ihre Grenzen. Wird beispielsweise ein Teil eines Objekts von einem anderen, nicht beweglichen Teil verdeckt, können die Sensoren des 3D-Scanners Bereiche der Objektoberfläche nicht erfaßen und nicht digitalisieren. Können stark spiegelnde Oberflächen nicht beschichtet werden, könnten auch sie von den Sensoren nicht erfaßt werden. Sollen diese Regionen des Objekts trotzdem in sein digitales Modell eingebunden werden, müssen sie nachträglich modelliert und ergänzt werden.
Bei ergänzenden Modellierungen sind mehrere Vorgehensweisen denkbar, die sich hinsichtlich Aufwand und Aussagekraft teils deutlich voneinander unterscheiden. In einigen Fällen kann es vorkommen, daß einige Teile eines problematischen Objektbereichs gescannt wurden. Sollen möglichst viele Scandaten in das 3D-Modell eingebunden werden, können diese Daten den Kern des modellierten Objektteils bilden und bei Bedarf modifiziert und/oder durch zusätzliche Flächen ergänzt werden, wie in der nebenstehenden Abbildung gezeigt. Diese Vorgehensweise ist zumeist mit einem höheren Aufwand verbunden als eine vollständige Neugestaltung des Bauteils - im Gegenzug integriert sie möglichst viele Meßdaten.
Fehlt ein Objektteil vollständig, oder soll der Aufwand reduziert werden, kann das entsprechende Teil komplett neu modelliert und später mit dem 3D-Scan verbunden werden. In diesem Fall kann (wie auch bei der Ergänzung von Scandaten) entweder frei nach Auge und visuellem Eindruck gearbeitet werden, oder das Objektteil wird anhand separat gewonnener Meßdaten (Dimensionen, Oberflächencharakteristika, Farbmeßung etc.) möglichst realitätsgetreu modelliert. Diese zweite Variante ist mit einem höheren Arbeitsaufwand verbunden - dafür belohnt sie uns mit einem deutlich realitätsgetreueren 3D-Modell des digitalisierten Objekts.




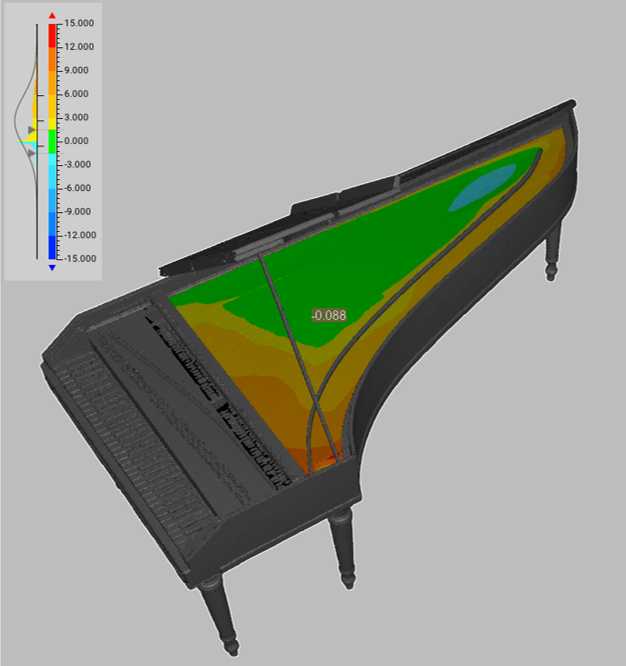

3D-Scanning und Photogrammetrie (auch Bildmessung genannt) sind eng mit messtechnischen Fragen verwandt. (Luftbild-)Photogrammetrie wird seit Langem zur Erstellung von Landkarten, digitalen Landschaftsmodellen, Erfassung von Architektur, zur Rekonstruktion von Unfällen und in medizinischen Anwendungen genutzt. In der Industrie wird 3D-Scanning zur Kontrolle und Analyse von Bauteilen und Fertigungsverfahren angewandt. Zwar dienen 3D-Modelle in geistes- und kulturwissenschaftlichen Einrichtungen überwiegend der Visualisierung von Kulturgut. Trotzdem zeigt sich auch hier das enorme Potential messtechnischer Nutzungen von 3D-Verfahren, beispielsweise zur Analyse von Fertigungsprozessen, zum Formvergleich oder zur Rekonstruktion beschädigter Bauwerke und Artefakte.
Um 3D-Modelle messtechnisch nutzbar zu machen, müssen ihre Meshes mathematisch umgewandelt werden. Aus Punkten und Polygonnetzen entstehen durchlaufende kurvige Oberflächen, die den realen Verlauf der Objektoberfläche so präzise wie möglich nachzeichnen. Damit die für wissenschaftliche Messungen benötigte Präzision erreicht wird, müssen Hochpräzisionsscanner genutzt werden. Auch die Nachverarbeitung der aufgenommenen Daten muss mit großer Sorgfalt erfolgen, um Manipulationen der Messdaten vorzubeugen.
Um die wissenschaftstheoretischen Anforderungen zu erfüllen, arbeiten wir an Erweiterungen und Ergänzungen der bereits bekannten mathematischen und algorithmischen Verfahren zur Optimierung von Hochpräzisionsdaten aus 3D-Scanning und Photogrammetrie. Unser Ziel ist die Nutzbarmachung der Verfahren für wissenschaftliche Messungen. Durch eine optimierte und vereinfachte Anwendung sollen die Verfahren orts- und personalunabhängig umgesetzt werden können. Ein Einsatz im musealen und universitären Rahmen ist ebenso möglich wie eine Nutzung der Verfahren während Grabungskampagnen und Exkursionen.
Dreidimensionale Messdaten können nicht nur durch 3D-Scanning und Photogrammetrie gewonnen werden. Verfahren wie die Koordinatenmesstechnik erfordern zwar einen deutlich höheren Zeitaufwand für die Aufnahme deutlich weniger Einzelmesspunkte, zeichnen sich aber durch eine bessere Kontrolle und bei richtiger Anwendung höhere Präzision der Messdaten aus. Sollen lediglich einzelne, festgelegte Dimensionen oder Punkte eines Objekts erfasst werden, kann die Koordinatenmesstechnik eine bessere Wahl als 3D-Scanning und Photogrammetrie sein. Nach dem Aufbau des Messsystems werden die gewünschten Punkte und Strecken manuell eingemessen und digital erfasst. Bei Bedarf kann das Verfahren zur Kontrolle Scan-basierter Messverfahren herangezogen werden.
Die 3D-Daten aller Aufnahmeverfahren können als Grundlage für CAD-Verfahren herangezogen werden. Beispielsweise ermöglichen die aufgenommenen Ist-Daten des Erhaltungszustands eines historischen Artefakts das Entwickeln von Rekonstruktionen früherer Zustände mit deutlich geringerem Aufwand als bei einem "Ausprobieren" und Umsetzen aller denkbaren Rekonstruktionen in realen Materialien.